 GDU
GDU
 UUFLY
UUFLY DJI
DJI MMC
MMC GDU
GDU XAG
XAG AOLAN
AOLAN KILO
KILO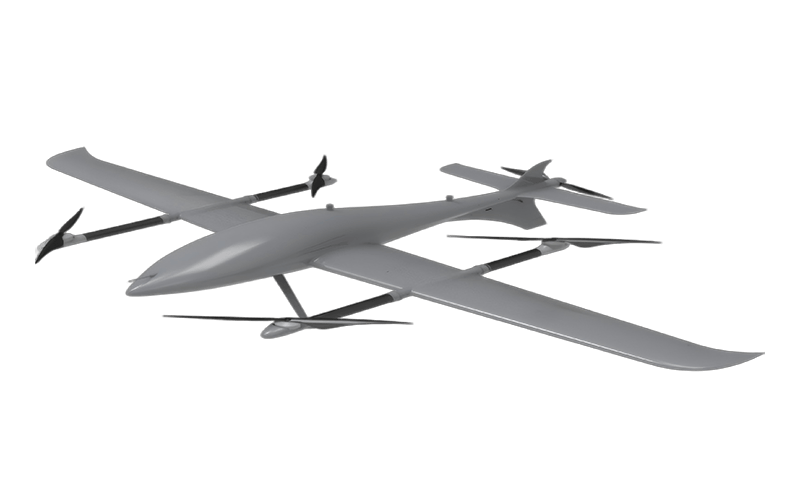 ĈIELO VENONTA
ĈIELO VENONTA- DJI Matrice-4T
- DJI Matrice 4E Virabelo
- DJI Matrice 4TD
- DJI Matrice 30T
- DJI Mavic 3 Enterprise
- DJI Mavic 3M Multspektra Drono
- DJI RC 2 Plus Industrio Plus
- Baterio de la DJI Matrice 4 Serio
- DJI Matrice 4D Serio Baterioj
- TB65 Inteligenta Flugbaterio
- TB100 Inteligenta Flugbaterio
- Baterio WB37
- DJI-akcesoraĵoj

Dragonfish Standard: Venonta-Generacia Multmisia eVTOL
Dragonfish Norma Multflanka Mult-Misia eVTOL UAV
Ekvilibra Eltenivo, Fleksebleco de Utila Ŝarĝo kaj Rapida Deplojo por Industriaj kaj Publikaj Sekurecaj Aplikoj

Dragonfish Norma Multflanka Mult-Misia eVTOL UAV
Ekvilibra Eltenivo, Fleksebleco de Utila Ŝarĝo kaj Rapida Deplojo por Industriaj kaj Publikaj Sekurecaj Aplikoj
Silenta Flugo
La Dragonfish atingas ultra-silentan flugon per sia escepta propulssistemo kaj noviga bruoredukta dezajno. Apenaŭ aŭdebla super 400 ft (120 m) AGL*, la DF signife reduktas la riskon de detekto samtempe certigante funkcian sekretecon.
Lernu Pli >>

Silenta Flugo
La Dragonfish atingas ultra-silentan flugon per sia escepta propulssistemo kaj noviga bruoredukta dezajno. Apenaŭ aŭdebla super 400 ft (120 m) AGL*, la DF signife reduktas la riskon de detekto samtempe certigante funkcian sekretecon.
Lernu Pli >>
Supera Kontraŭ-Interfero
En kompleksaj medioj, la senpilota aviadilo konservas esceptan komunikadan kaj videotransmittecan rendimenton, havante fortajn kontraŭinterferajn kapablojn kaj stabilan, fidindan dissendon.

Supera Kontraŭ-Interfero
En kompleksaj medioj, la senpilota aviadilo konservas esceptan komunikadan kaj videotransmittecan rendimenton, havante fortajn kontraŭinterferajn kapablojn kaj stabilan, fidindan dissendon.
Kial profesiuloj elektas Dragonfish Standard?

GNSS-Perdo-Protekto
Kiam ĝi funkcias en ne-GNSS-medioj, la senpilota aviadilo aktivigas surteriĝoprotekton, aŭtomate descendante de sia nuna pozicio por certigi sekurecon.
Malalta-Bateria Reveno
Uzantoj povas agordi la atendatan baterionivelon por alteriĝo. La senpilota aviadilo kalkulas la optimuman reventempon en reala tempo surbaze de nunaj baterioniveloj kaj flugstato, certigante, ke ĝi alteriĝas kun baterionivelo proksima al la uzanto-difinita sojlo.
Perdita-signala reveno
Se la signalo inter la senpilota aviadilo (UAV) kaj la surtera stacio estas interrompita, la protekto kontraŭ konektoperdo aktiviĝas. Se GNSS-signaloj estas haveblaj, la UAV iniciatas aŭtomatan revenon al la hejmo.
Kriz-Mana Superregado
En kazo de kriza situacio, vi povas ŝalti la teleregilon al M-reĝimo iam ajn por tuj preni manan kontrolon, certigante flugsekurecon.

Multoblaj Redundoj, Certigante Misiosekurecon
La eVTOL havas plurnivelajn redundojn tra ŝlosilaj komponantoj (baterioj, sensiloj, komunikaj busoj) kaj aŭtonoman reĝimŝaltadon, certigante stabilan flugon kaj fidindan rendimenton eĉ en kompleksaj medioj.
Unu-Frapeta Memkontrolo
Aŭtomate plenumas sistemkontrolon antaŭ deteriĝo, certigante ke ĉiu flugo estas sekura kaj fidinda.
Unu-Butona Reveno
Facile revenu hejmen per la butono Hejmo. Praktika Stokado: Rapide organizu post flugo, facile stokebla kaj preta por la sekva uzo.
Inteligenta Spurado
La senpilota aviadilo povas fiksi siajn celojn kaj flekseble ĝustigi sian flugvojon. Ĝi subtenas plurajn spurajn reĝimojn.

Movebla Platforma Deteriĝo kaj Surteriĝo
Subtenas deteriĝon kaj alteriĝon sur moviĝantaj platformoj.
Specifoj de Dragonfish Dragonfish Standard
| Specifo | Detaloj |
| Tipo | Klinrotora Multmisia eVTOL UAV |
| Dimensioj | 1948 × 3295 × 520 mm (inkluzive de helicoj) |
| Pezo | 7.5 kg (inkl. 2 baterioj, helicoj; sen gimbal-utila ŝarĝo) |
| Maksimuma Utila Ŝarĝa Kapacito | 1.5 kilogramoj |
| Maksimuma Flugtempo | 126 minutoj (kun norma utilŝarĝa konfiguracio) |
| Maksimuma Horizontala Rapido | 120 km/h |
| Maksimuma Horizontala Rapido | 126 km/h (35 m/s) |
| Maksimuma Vento-Rezisto | 15 m/s (fiksflugila reĝimo), 12 m/s (vertikala flugreĝimo) |
| Maksimuma Servoplafono | 5000 metrojn super marnivelo |
| Funkciiga temperaturo | -20°C ĝis 50°C |
| IP-rangigo | IP43 |
| GNSS-Subteno | GPS + GLONASS + BeiDou + Galileo (multkonstelacia poziciigado) |
| Maksimuma Signala Transdona Gamo | 30 kilometroj |
| Deploja Tempo | ≤5 minutoj (senila rapid-liberiga muntado) |
Grandeca Komparo

akcesoraĵoj

Dragonfish Grunda Stacio

Autel Smart Antenna Transmission (ASAT) (Laŭvola)

Autel Dragonfish Nest (Laŭvola)

Drakfiŝa Ripetilo (Laŭvola)
Adaptiĝa produkto

Marborda Kontraŭ-Kontrabanda

Polica Devigo

Arbara Fajro-Preventado

Inspektado de Alttensia Linio

Trafika Inspektado




